




Context
In the context of increasingly hybrid conflicts and more complex, highly robotized operational environments, the Cyber, Defense & Security innovation axis aims to develop technologies that strengthen resilience and effectiveness in the field. Within this axis, Mobile & Robotic Food Tech addresses a critical human factor: operators’ well-being and mental health. Under sustained stress, fatigue, and isolation, access to high-quality food supports recovery, cognitive performance, and psychological stability—directly influencing decision-making and operational readiness. This project therefore explores mobile robotic kitchens that can simplify meal preparation and distribution despite field constraints, improving living conditions and sustaining performance for deployed personnel.
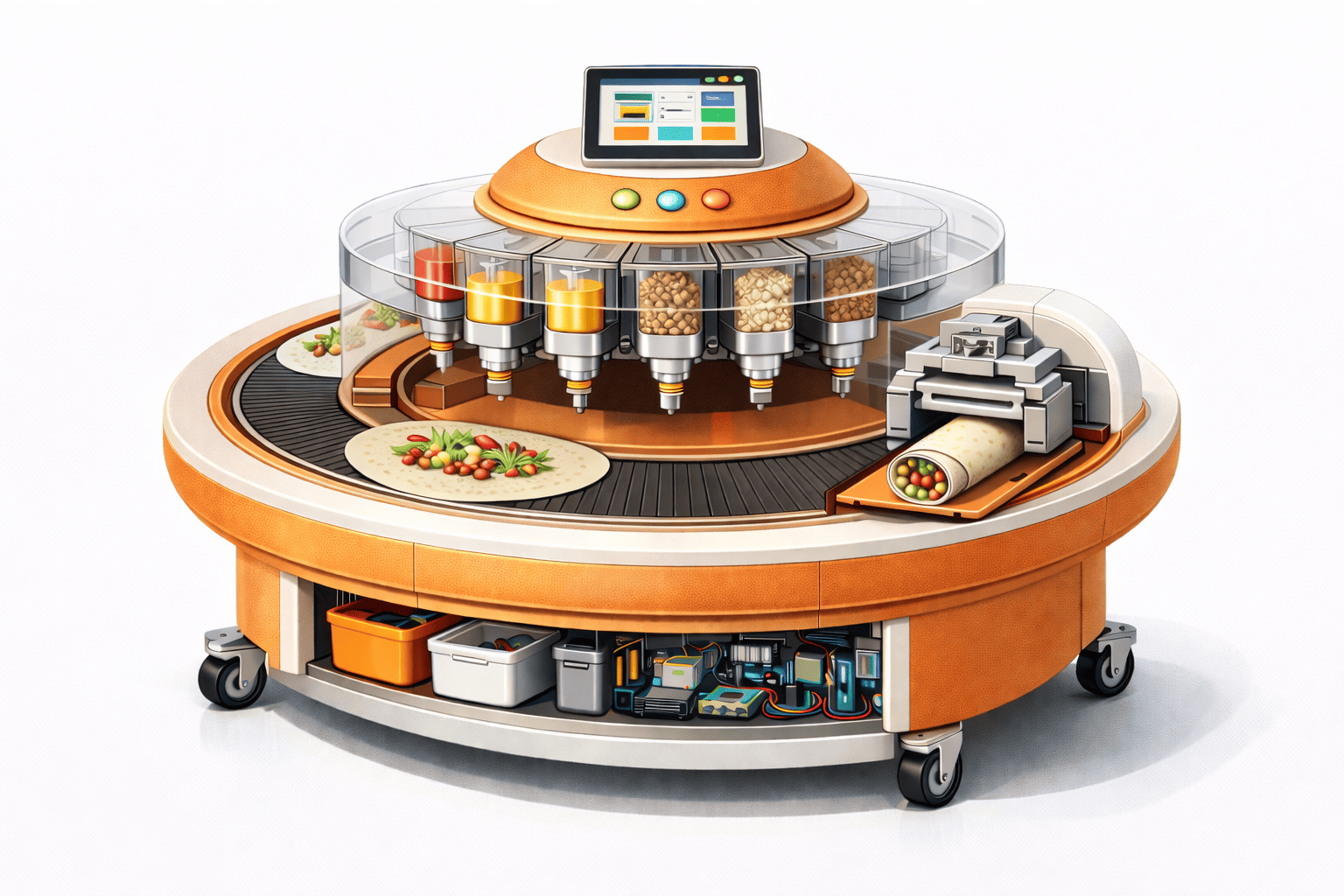
The Mobile Kitchen project is a showroom demonstrator : a mobile, attractive, and immediately understandable machine that visibly showcases the dispensing and assembly of ingredients (dry and liquid) to produce a bowl or wrap-style preparation. The goal is not to replace a professional kitchen, but to offer a technology showcase that creates a “wow” effect while remaining educational: you can see the steps, understand the logic, and explain simply what is happening. Designed to be modular, the system should allow experimentation with different recipes and configurations (ingredient cartridges, sequences, demonstration modes), with particular attention paid to safety, cleanliness, maintenance, and repeatability.
Development will be carried out by a team of 4 to 5 students, with the goal of delivering a robust, presentable prototype that can be operated in real conditions during open days or events.
General Overview
Below, you will find:
- 3 visual proposals for the bowl version
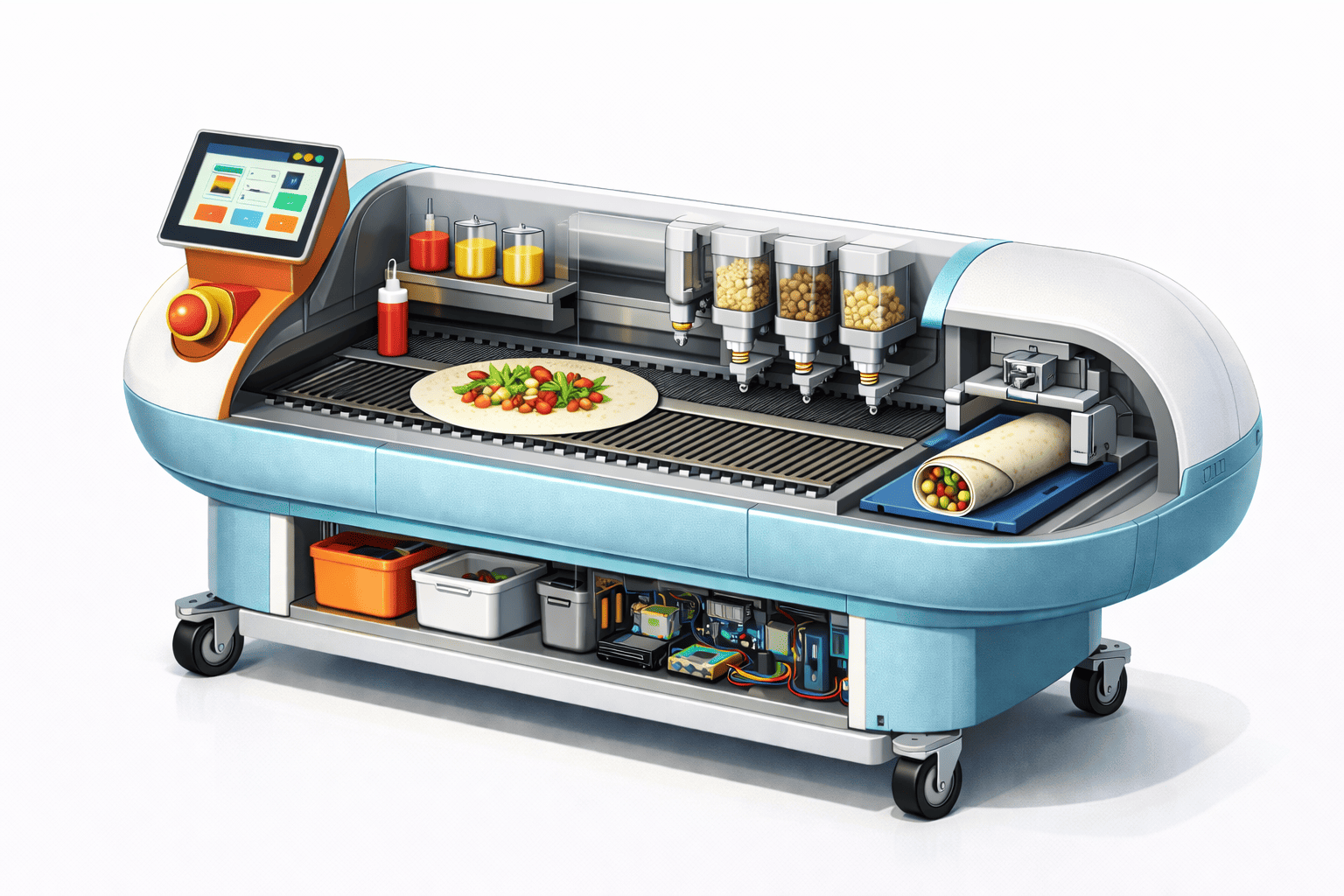
- 3 visual proposals for the wrap version
These visuals serve as an inspiration moodboard to help you project yourself into the project, but you are free to propose your own aesthetic and design choices (while respecting the requirements specification presented below).
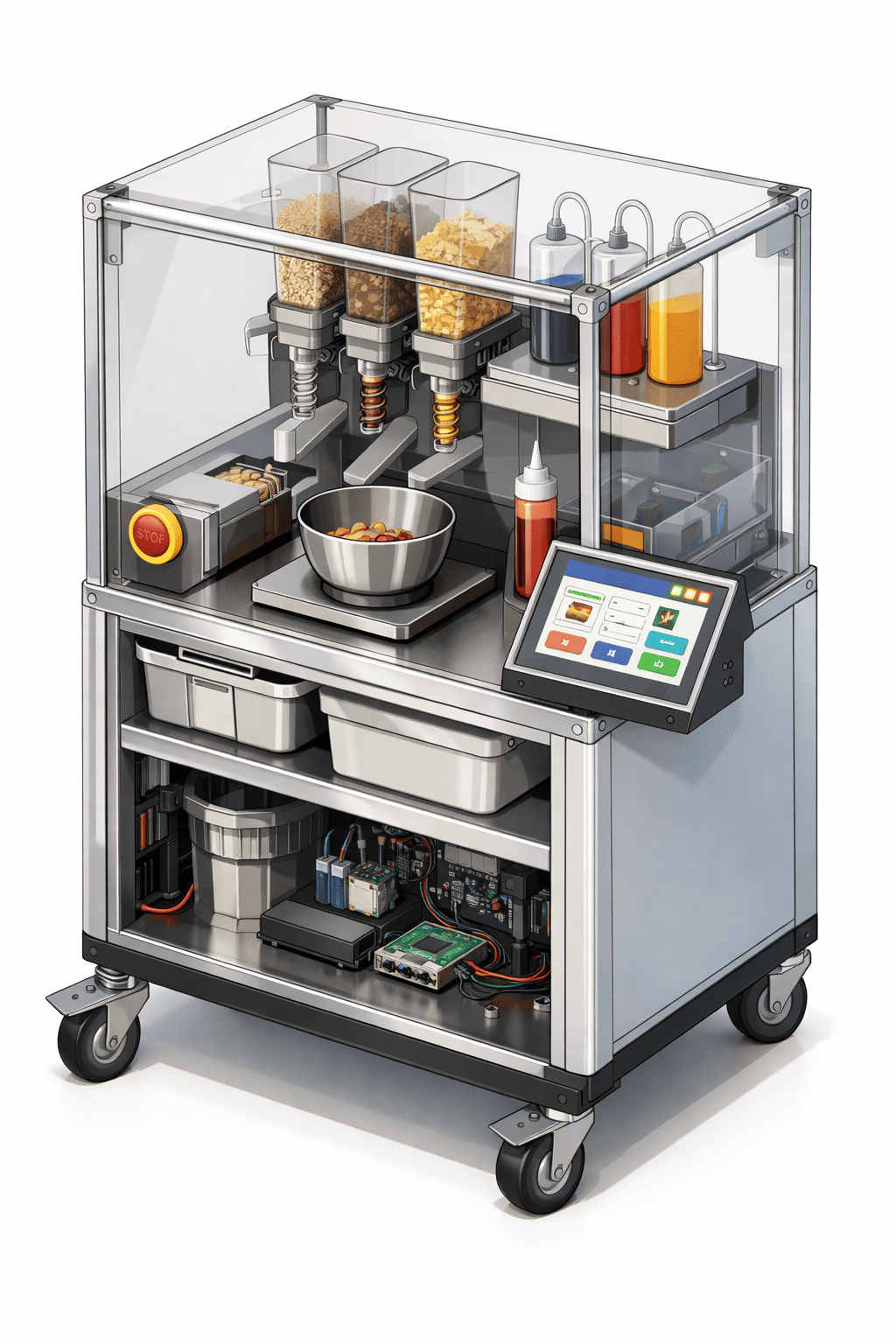
Mobile Bowl Kitchen - Idea 1
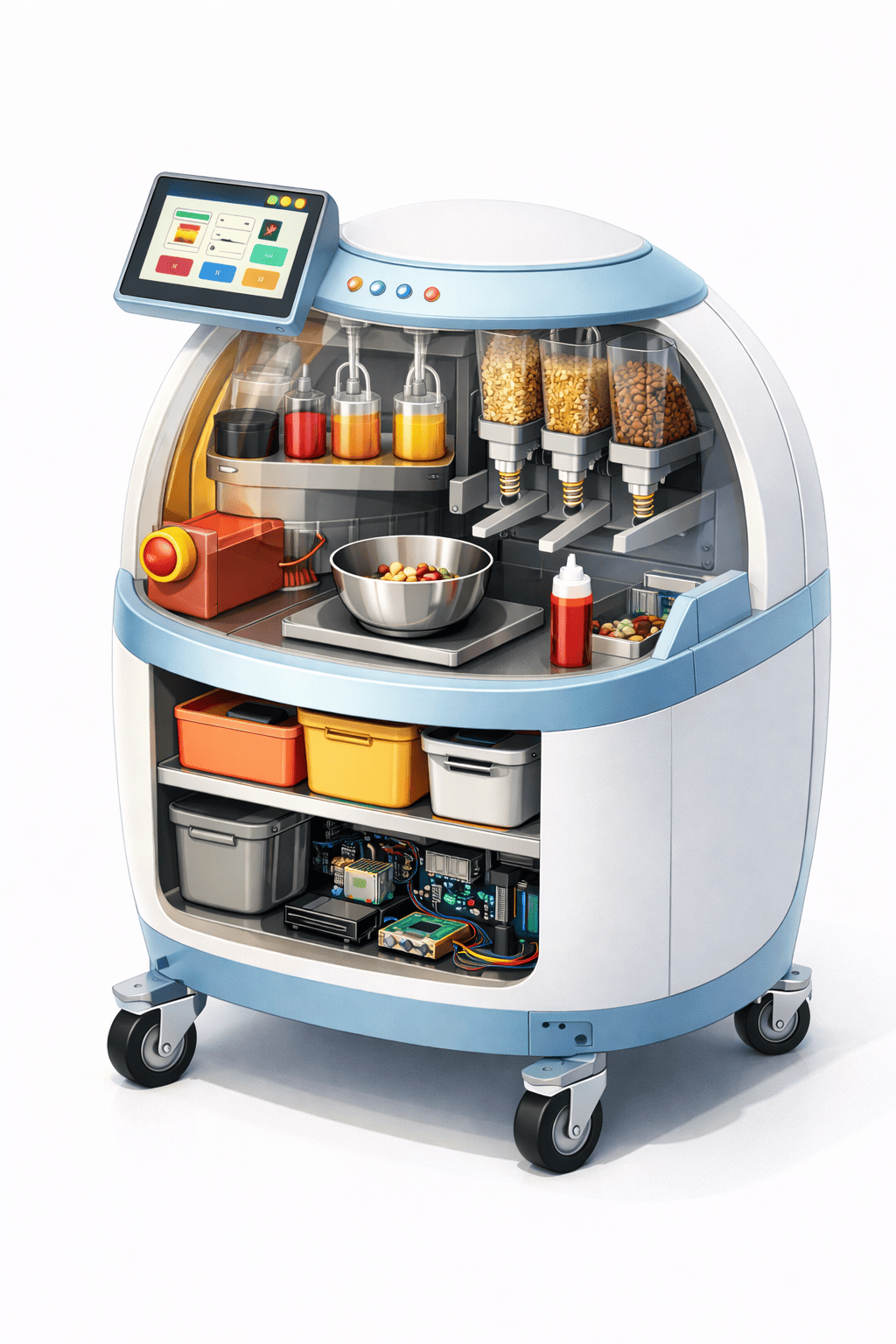
Mobile Bowl Kitchen - Idea 2

Mobile Bowl Kitchen - Idea 3

Mobile Wrap Kitchen - Idea 1
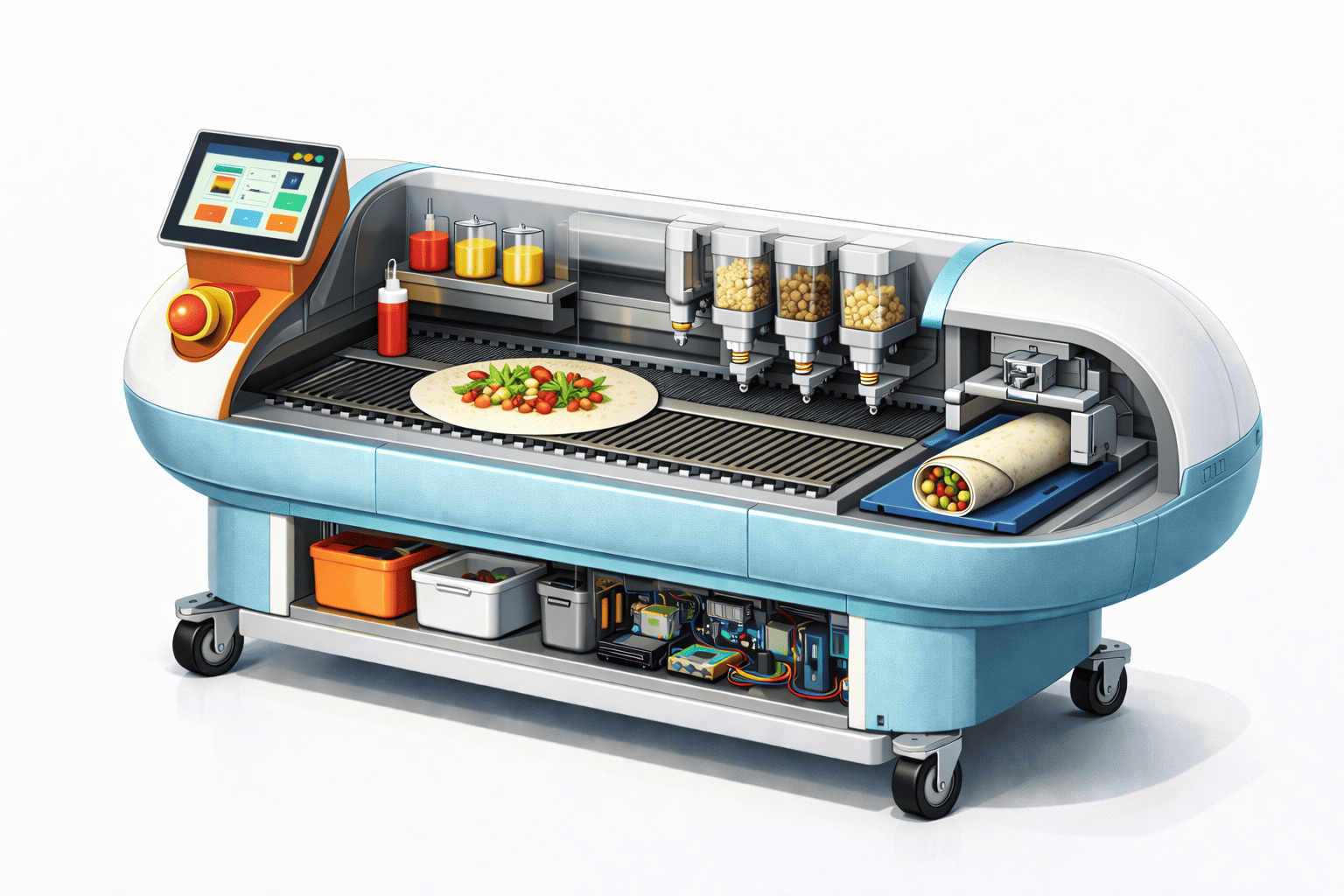
Mobile Wrap Kitchen - Idea 2
Mobile Wrap Kitchen - Idea 3
Below you will find the elements present in some or all of the designs (this is a non-exhaustive list).
Having been deemed relevant to this project, it is desirable that they be included in your final proposal.
Assembly area
- Work surface (clean zone / hygiene constraints)
- Integrated scale (highly encouraged: weight-based portion control)
- Bowl or tortilla holder (depending on the selected version)
Dry ingredients
- Dry-ingredient bins (toppings, seeds, etc.)
- Dry dispensers (dispensing mechanism)
- Chutes / guides directing ingredients to the assembly area
Structure & mobility
- Transparent cover (plexi or polycarbonate)
- Chassis / structure (profiles and panels or equivalent)
- Lockable casters (wheels with brakes)
Operation & maintenance
- Storage bins (consumables + ingredient refills)
- Waste / catch tray (cleanliness / cleanup)
- Control electronics + Power distribution
Interface & safety
- Touchscreen or tablet (to control the demonstration)
- Status indicators (ready / running / error)
- Emergency stop button (E-STOP)
Liquid ingredients
- Liquid reservoirs (sauces, oils, etc.)
- Tubing (reservoir → nozzle connection)
- Anti-drip nozzles (clean dispensing)
Technical Specification Schematic
The technical diagram below proposes a reference architecture showing how all of these elements can be organized together to make the demonstrator function.
This is a baseline proposal, designed as a solid and coherent prerequisite: it is strongly recommended to follow it, unless you propose an alternative that you consider more relevant (and that you are able to justify).
If you choose a different architecture, make sure in all cases that it complies with the requirements specification presented further below.
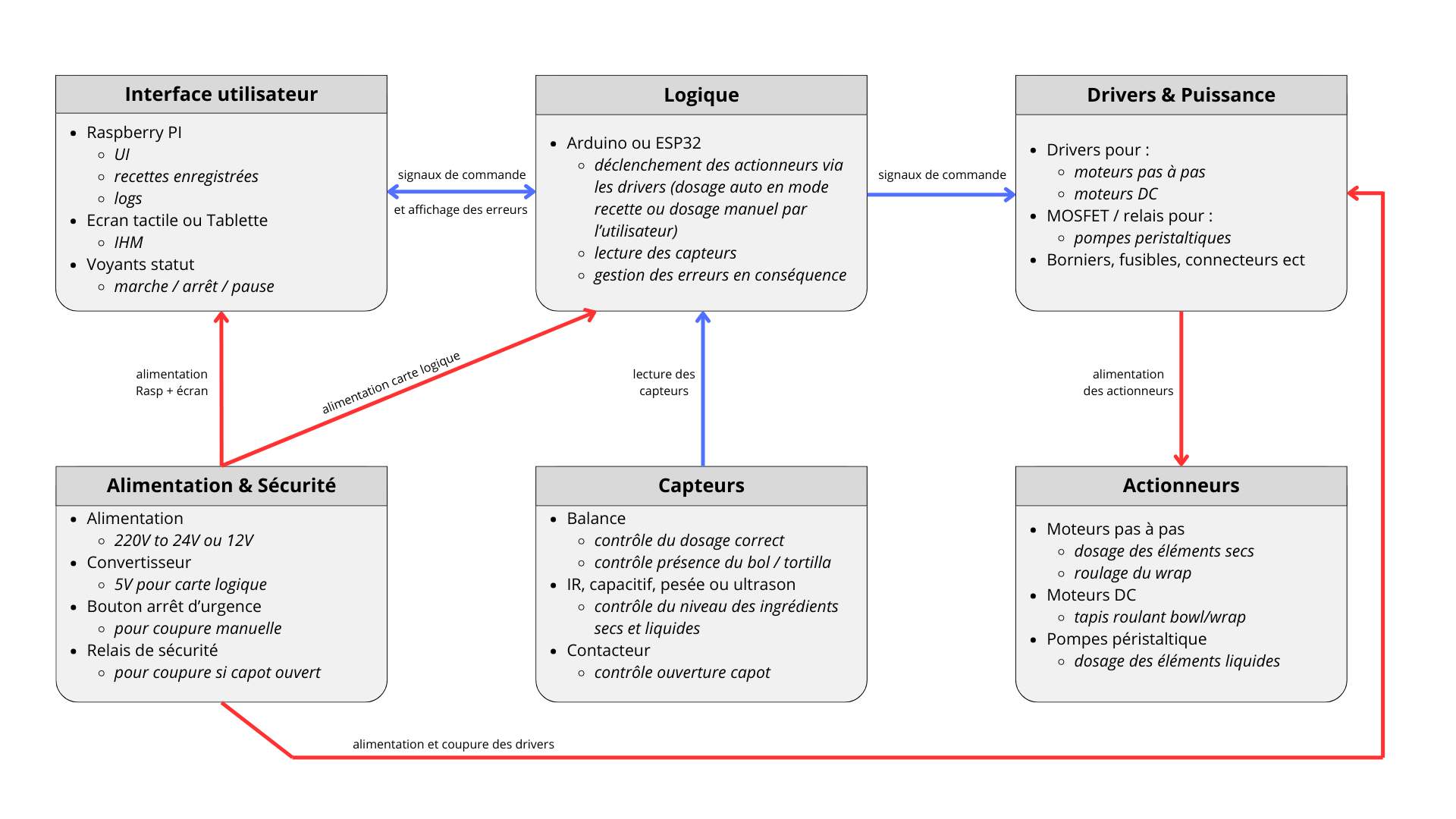
Blue lines represent information flows, and red lines represent power (energy) flows.
Requirements Specification
1. Project objectives
Design a semi-automated mobile kitchen demonstrator showcasing the dispensing and assembly of a bowl or wrap-style recipe, with a result that is impressive, easy to understand, and repeatable in a showroom / open-day context.
2. General constraints
2.1 Mobility & footprint
- The system must be movable by 1 to 2 people (casters, handholds).
- It must fit through a standard doorway and be quick to position in an exhibition area.
- Stability: lockable casters (wheels with brakes) or an equivalent system.
2.2 Public safety
- Must be usable in front of the public without risk (pinching, cutting, burning, splashing).
- Include an emergency stop that is immediately accessible.
- Moving/electrical parts must be inaccessible to the public during operation.
2.3 Transparency & “showcase” effect
- Preparation areas (dispensing + assembly + optional rolling) must be visible behind transparent covers.
- The covers must enable immediate understanding of how the system works.
4. Ergonomics & operation requirements
4.1 Operation
- Simple operation: an operator must be able to start a demo without lengthy training.
- Easy access to refill ingredients and restart a sequence.
- Critical actions must be guided (on-screen instructions / pictograms).
4.2 Cleaning & hygiene (demonstrator)
- Easy-to-wipe surfaces, limited spill zones.
- Provide an accessible catch tray (waste, drips, scraps).
- Elements in contact with ingredients must be removable or quick to clean.
4.3 Maintenance & robustness
- Modules must be accessible (hatches/panels) for diagnosis.
- Cables and tubes must be organized and protected (not dangling, not exposed).
- Must tolerate repeated use.
6. Framed design freedom
The design is free, provided it respects:
- transparent covers over active areas,
- mobility on casters,
- public safety,
- readability of the demonstration,
- dedicated zones: ingredients / assembly / output / waste / consumables.
3. Functional requirements
3.1 “Showroom” demonstration
- Provide an autonomous demo mode (loop) + an operator-controlled mode (operator-triggered start).
- The demonstration must be understandable within 30 seconds for a non-technical visitor.
- Clear interface with states: ready / running / finished / error.
3.2 Dispensing & assembly
-
Must support at minimum:
- dry ingredients (at least 2 types)
- liquid ingredients (at least 1 type)
-
Dispensing must be repeatable (consistent quantities from one demo to the next).
-
Drop/dispense must be controlled (avoid splashes/uncontrolled spills).
3.3 Bowl version
- Provide an area where the bowl is positioned (simple placement, guided).
- Dispensing must occur into the bowl without requiring dangerous handling.
3.4 Wrap version
- Provide an area where the tortilla is laid flat (not rolled), then an area where the final wrap is produced.
- Steps must be clearly readable: sauce/ingredients deposition → rolling (semi-auto or auto depending on choice).
- Final wrap must be presentable (holds shape, output/serving tray).
5. Integration requirements (showroom)
5.1 Scenography / readability
- A clear “public-facing” area: logo/title, pictograms, steps.
- Internal lighting or highlighting possible (without dazzling the operator).
5.2 Noise & comfort
- Noise level must be compatible with an exhibition space (no aggressive continuous noise).
- Movements should feel smooth and controlled.
7. Expected deliverables (validation)
- A functional demonstrator (bowl or wrap, or both if feasible, or another relevant proposal).
- An autonomous demo mode (pre-recorded recipes) + a manual mode (controlled via tablet/screen).
- A user guide + safety instructions.
- A cleaning/maintenance procedure (e.g., checklist).
- A visual support (poster/pictograms) explaining the steps.
SOTA — Food robotics & “makelines” (references 2024–2026)
click on the titles to access the corresponding links
1. NOSH Robotics — Nosh (CES 2026)
- Compact robotic kitchen (a “showcase product” format) presented at CES 2026
- Autonomous cooking/prep appliance
- Consumer positioning + “recipes” user interface
2. Hyphen — Augmented Makeline (bowl / salad assembly)
- Automated makeline designed for food service (bowl/salad assembly)
- Under-counter automated assembly + “digital orders” workflow
- Demos and pilot deployments (e.g., Chipotle)
3. Picnic Works — Picnic Pizza Station (topping / dispensing)
- Robotic dispensing station (sauce/cheese/toppings) on a pizza base
- Modular makeline (ingredient dispensing)
- “Dishwasher-safe” parts announced / compact format
4. RoboBurger — “restaurant in a box” (hot food vending)
- All-in-one autonomous burger machine (vending format)
- Cooking robot + assembly in a compact footprint
- “Plug & go” positioning
5. BurgerBots — automated burgers (made-to-order)
- Robotic systems focused on repeatable burger production
- Made-to-order + automated sequences
6. Creator (Momentum Machines) — burger robot “showcase”
- Historic robot-burger concept often cited for its “showcase” effect and visible mechanics
- “Behind glass” robotic assembly
7. Blendid — autonomous smoothie kiosks
- Robotic beverage/smoothie kiosks (compact, autonomous)
- Ingredient dispensing/distribution + ordering interface
- Deployed in public locations (campuses, offices, retail…)
8. Cafe X — Robotic Coffee Bars
- Automated coffee bar (robot + ordering UX) designed for high-traffic locations
- Autonomous system + “showcase” experience
9. Vebu — Autocado (avocado prep)
- Targeted automation module (avocado preparation), often cited for “single-task” automation
- Machine dedicated to one step (cut/peel/pit)
10. Chipotle — Augmented Makeline by Hyphen (pilot)
- Official communication about a pilot for automated bowl/salad assembly
- Automated makeline dedicated to bowls/salads (digital-order workflow)
11. PAZZI — automated pizza (autonomous take-away)
- Automated pizza concept (robot + visible experience)
- Autonomous production + staging/showmanship
12. Piestro — automated pizza (compact format)
- Pizza automation concept aiming for reduced footprint and standardized output
- Automation + reduced footprint