





Context
Autonomous drone swarms offer a transformative capability for both national security and civilian protection, operating as highly adaptive systems able to coordinate, perceive, and act collectively in complex environments. In defense and territorial security, their distributed intelligence enables persistent surveillance, rapid threat detection, and resilient response operations—even if individual units fail—making them particularly valuable for border protection or counter‑intrusion scenarios. The same technology becomes equally critical in natural‑disaster contexts, where swarms can map damaged areas, locate survivors, assess structural risks, and deliver essential equipment far more quickly and safely than human teams. By combining collective autonomy, real‑time sensing, and AI‑driven coordination, drone swarms represent a powerful dual‑use technology, enhancing both military readiness and humanitarian resilience.
General Overview
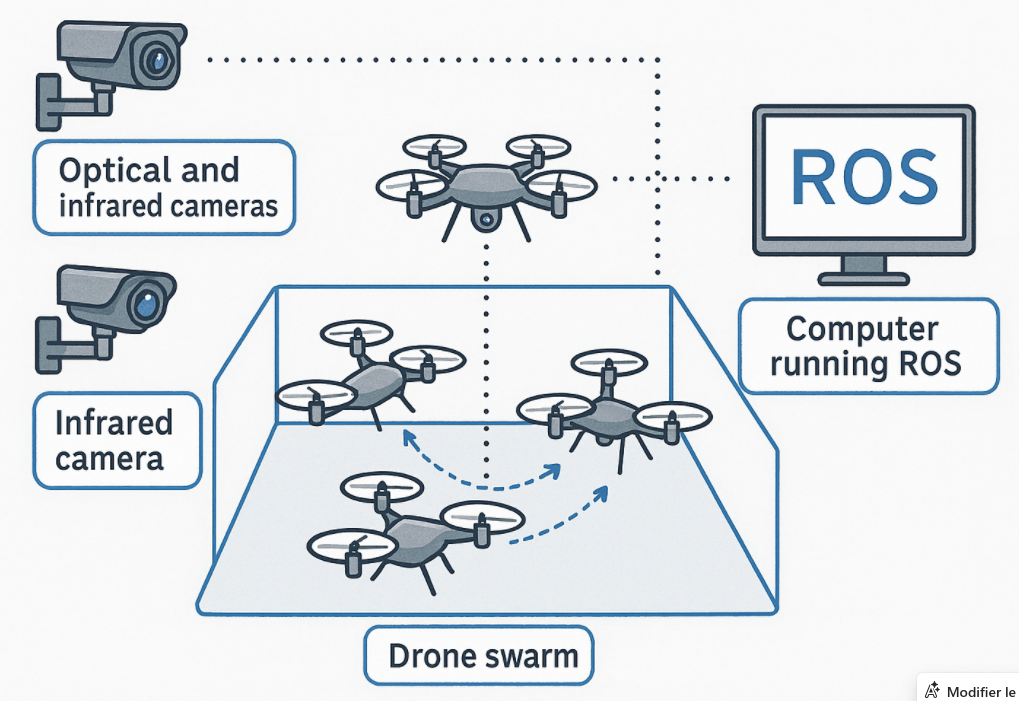
A controlled indoor testbed can be designed in which a swarm of lightweight drones is tracked in real time by a network of optical and infrared cameras, while a computer running ROS manages all estimation and control loops. The camera system provides precise 3D positions and velocities for each drone, feeding ROS nodes responsible for formation control, collision‑avoidance algorithms, and individual flight regulation. Commands generated in ROS are transmitted to each drone’s flight controller, closing the loop between perception, decision‑making, and actuation in a fully instrumented environment. All data streams—images, trajectories, control inputs—are recorded for training and evaluating swarm‑control algorithms before transitioning to onboard perception using the drones’ own cameras.
Technical Stages
Designing such a controlled drone‑swarm testbed involves several major technical stages: setting up a calibrated network of optical and infrared cameras to provide ground‑truth tracking; integrating these sensors with ROS through dedicated nodes that publish real‑time odometry; developing formation‑control and collision‑avoidance algorithms that operate on this high‑precision feedback; closing the loop by sending commands to each drone’s flight controller through MAVROS or micro‑ROS; and finally recording all data streams for evaluation and later deployment on onboard computer‑vision systems. This step‑by‑step process ensures that algorithms can be validated safely and rigorously before being transferred to real‑world, camera‑onboard autonomous flight.
Provided Materials
- Set of Drones
- Experimental Area
- Array of Opti Track Cameras
Developed Skills
- Robotics middleware: ROS / ROS 2 (topics, services, tf2, QoS, launch files).
- Drone systems: PX4 or ArduPilot, MAVLink/MAVROS, flight‑control fundamentals.
- Computer vision: multi‑camera calibration, optical/IR tracking, AprilTags/ArUco, SLAM/VIO basics. *Control theory: PID/LQR/MPC, formation control, multi‑agent coordination.
- Collision‑avoidance algorithms: ORCA/RVO, potential fields, trajectory planning.
- Software engineering: Python/C++, ROS package development, real‑time data handling.
- Simulation: Gazebo/Ignition, rosbag2 replay, scenario design.
- Safety and testing: risk assessment, fail‑safe procedures, indoor flight protocols.
Pedagogical Goals
- Project Management
- Drone Technology
- Research experimentation