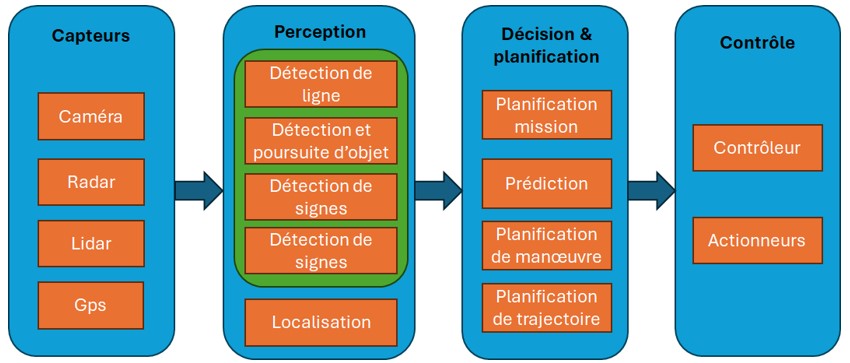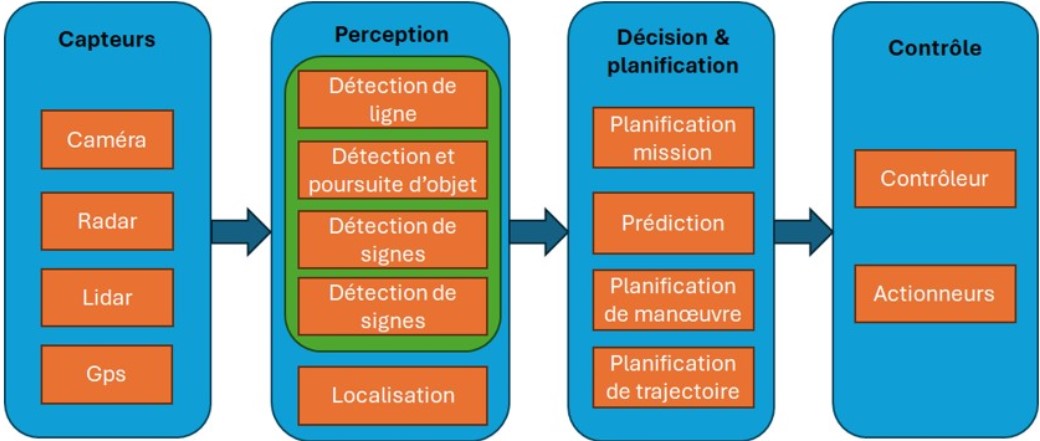

Les véhicules autonomes représentent une avancée technologique majeure dans le domaine de la mobilité, en offrant des solutions plus sûres, plus durables et plus inclusives. En réduisant la dépendance à l’intervention humaine, ces systèmes permettent de limiter les erreurs de conduite, principales causes des accidents de la route. Par ailleurs, l’optimisation des trajectoires et des comportements de conduite contribue à diminuer la consommation énergétique et les émissions de gaz à effet de serre, renforçant ainsi leur impact positif sur l’environnement. Enfin, l’automatisation de la conduite ouvre de nouvelles perspectives d’accessibilité pour les personnes à mobilité réduite, les personnes âgées ou celles ne disposant pas de permis de conduire, rendant les transports plus équitables et universellement accessibles. Ces véhicules sont équipés de plusieurs modules matériels et logiciels, comme illustré dans la Figure ci-dessous. Le bon fonctionnement d’un véhicule autonome dépend fortement de la qualité des données collectées par ses capteurs. Ces données sont utilisées pour reconstruire la structure de l'environnement, ce qui permet au véhicule autonome de prendre des décisions et de planifier ses mouvements.
Cependant, la précision de la structure de l'environnement reconstruite dépend étroitement de la précision des capteurs. Bien que plusieurs techniques aient été proposées pour offrir des solutions en supposant des capteurs parfaits et une connaissance parfaite de l'environnement, en réalité, les données issues de capteurs sont souvent affectées par des bruits, ce qui rend ces techniques moins fiables et peut entraîner des collisions.
Pour remédier à ce problème, la stratégie de prise de décision et de planification doit intégrer un modèle de propagation de l'incertitude de l'environnement ainsi que de l'incertitude de localisation des véhicules autonomes sur un horizon temporel. Dans un premier temps, nous avons mené une étude comparative de plusieurs techniques d'estimation de la posture des véhicules autonomes, basées sur le filtre de Kalman, en examinant leur impact lors de la poursuite d'une trajectoire planifiée dans un scénario de dépassement.
Dans un scénario plus complexe, le véhicule autonome (VA) évolue dans un environnement en présence d’autres véhicules. Dans ce contexte, le modèle de perception du VA comporte des incertitudes sur la position du VA ainsi que celle des véhicules environnants. Afin de minimiser les risques de collusions dus à ces défauts de perception, le module de décision et de planification doit prendre en compte ces incertitudes et leurs propagations pour un horizon de temps approprié, afin de rendre la prise de décision et les trajectoires planifiées plus robustes. Pour répondre à cette problématique, la technique de la commande prédictive stochastique (SMPC en anglais) constitue une voie intéressante à explorer, sur ce point que nous travaillons actuellement. Ce travail de recherche est mené en collaboration avec le laboratoire DRIVE de l’université de Bourgogne.