
This project focuses on the control and observation of time-delay systems, which frequently arise in engineering applications. The presence of delays can compromise stability and performance, requiring specialized design methods. The study aims to develop control strategies and observer designs using recent tools in the stability of delayed systems related to the partial poles placement (PPP) and based on Multiplicity-Induced-Dominancy (MID) property.
Observer-based controller design
An observer based control problem for SISO (Single-Input/Single-Output) LTI (Linear Time Invariant) system subject to delay in the measurement data. The proposed design approach includes two steps: first, by using a partial pole placement approach based on the MID (Multiplicity-Induced-Dominancy) property, we construct a delay-based controller guaranteeing the stability of the closed-loop system. Second, we exploit the control gain to determine the observer-controller matrices.
Adaptive observer design and application
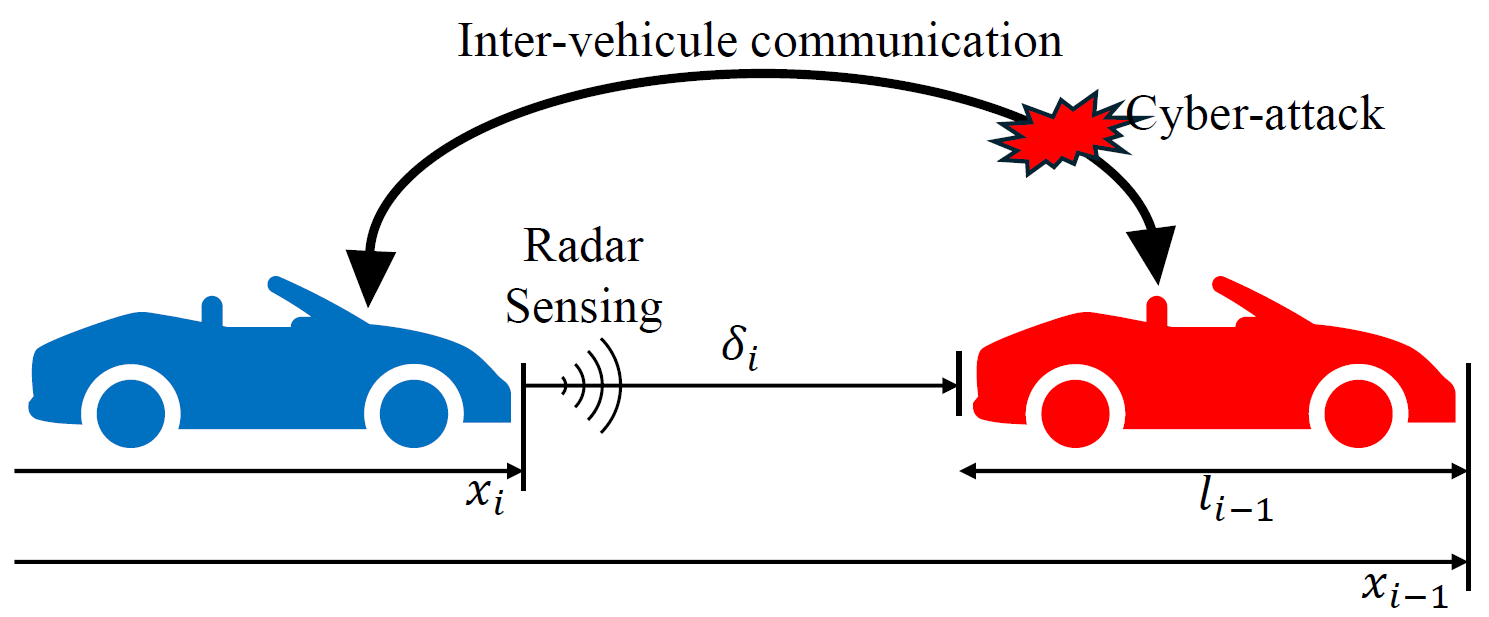
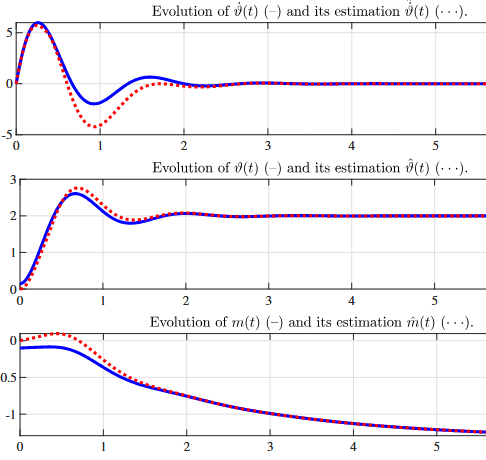
The aim is to estimate the cyberattack jointly with the system dynamics in the presence of transmission delay in the communication channel of a semi-autonomous adaptive cruise control system. The dynamics of the estimation errors are expressed by delay-differential equations, and its stability analysis makes use of the multiplicity-induced-dominancy property for spectral values of the error estimation equation.